
Lecture 08 Discrete Differential Geometry
三角网格曲面的两种理解:
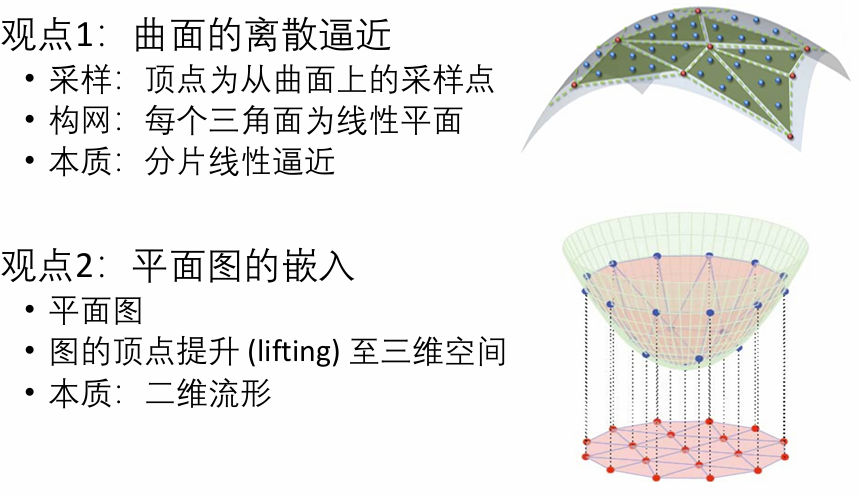
G{V, E, F}:V-顶点集合 E-边集合 F-三角形集合
多边形网格均可转化为三角网格(不考虑流形结构)
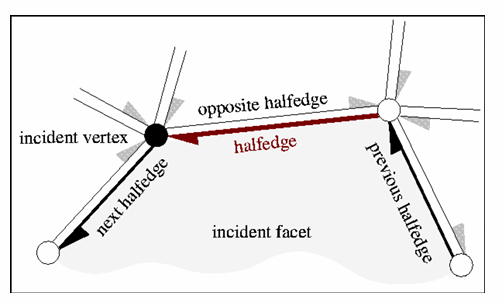
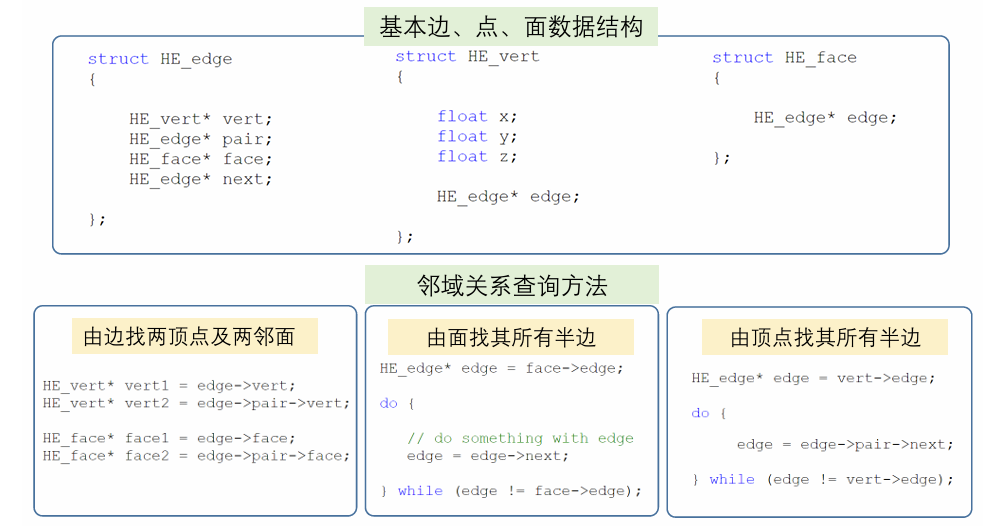
半边数据结构:以“边”为中心的数据结构
- 网格连接关系存储在边上,每条边表达为两条“半边”
- 目的:提高点线面的查询或增删改操作的效率
几何(网格)处理库:
曲线曲面的微分几何
法向:
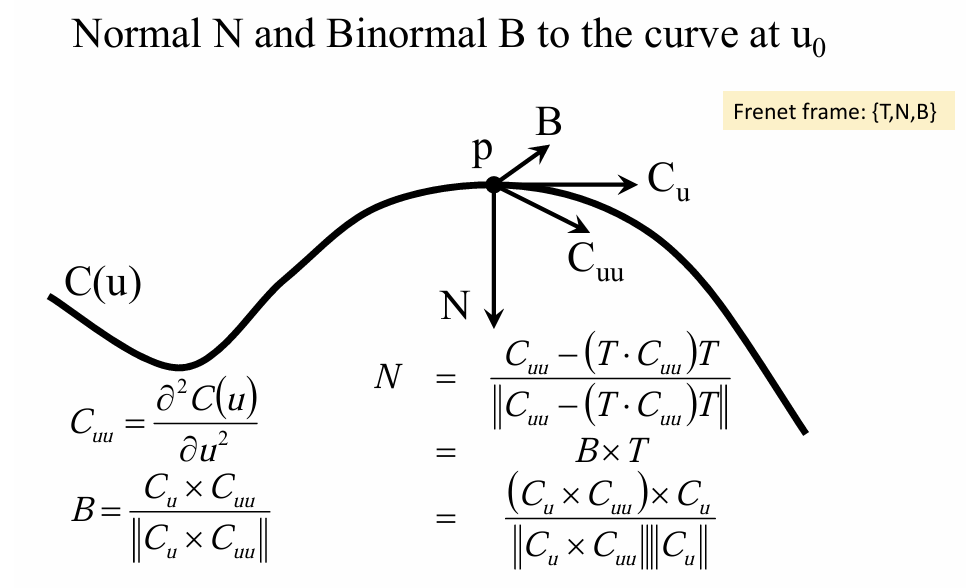
曲率:曲线形状由曲率决定
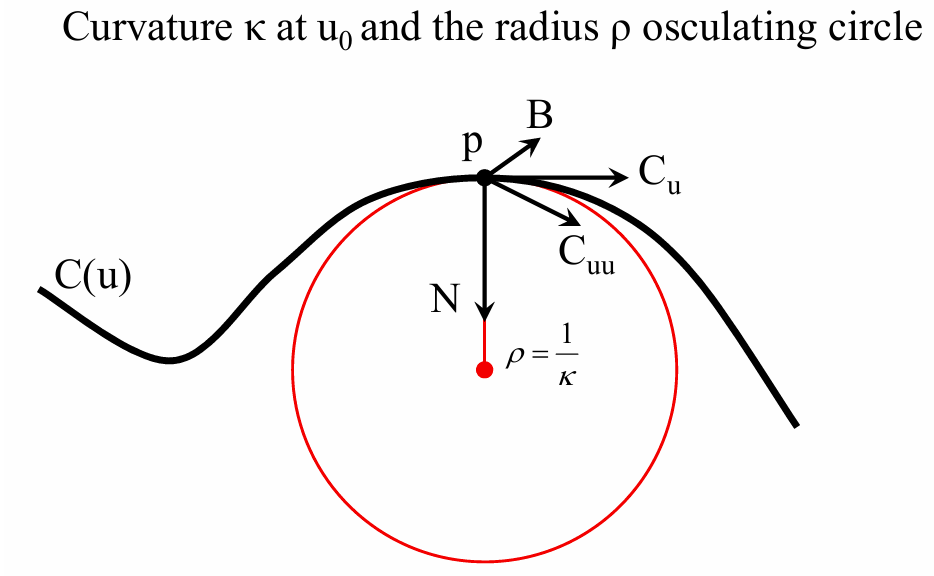
方向曲率:曲率是随着方向变化的
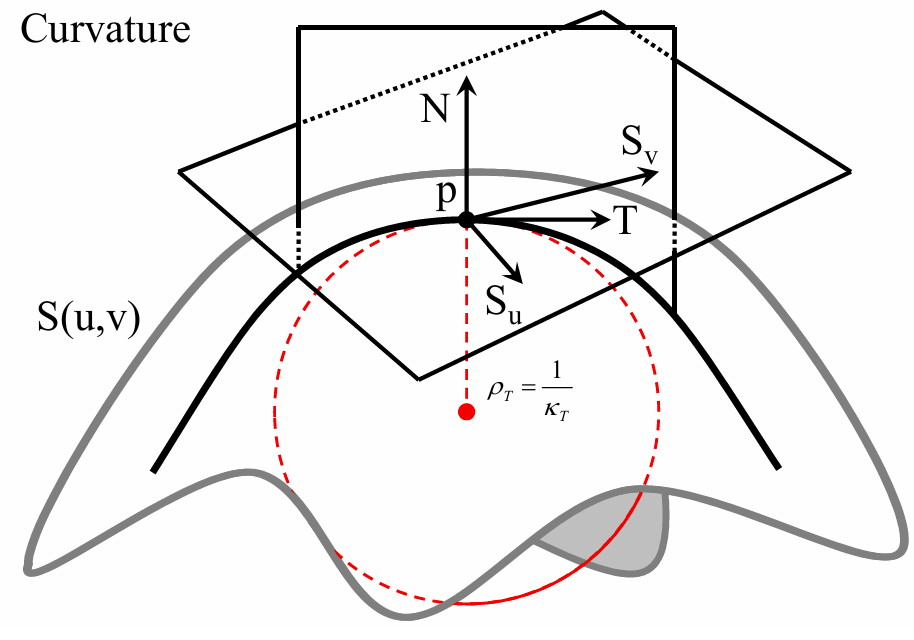
曲面的曲率:
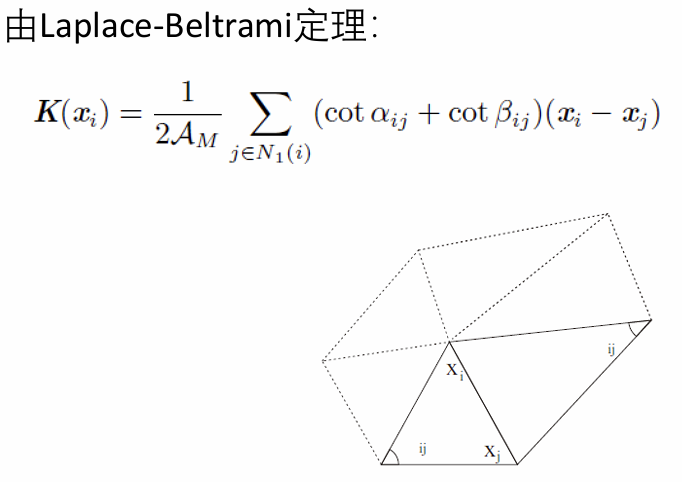
离散微分几何
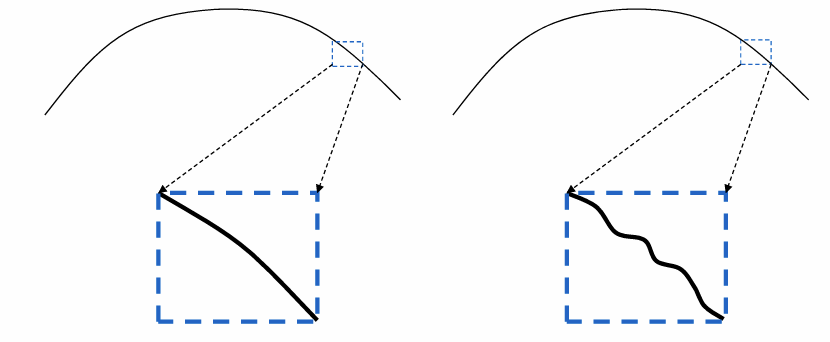
从光滑曲面上采样的离散点只有C0连续,但希望通过不可微的离散点得到原来光滑曲面的微分属性
方法:
- 连续逼近
- 离散逼近(这节课主要研究内容)
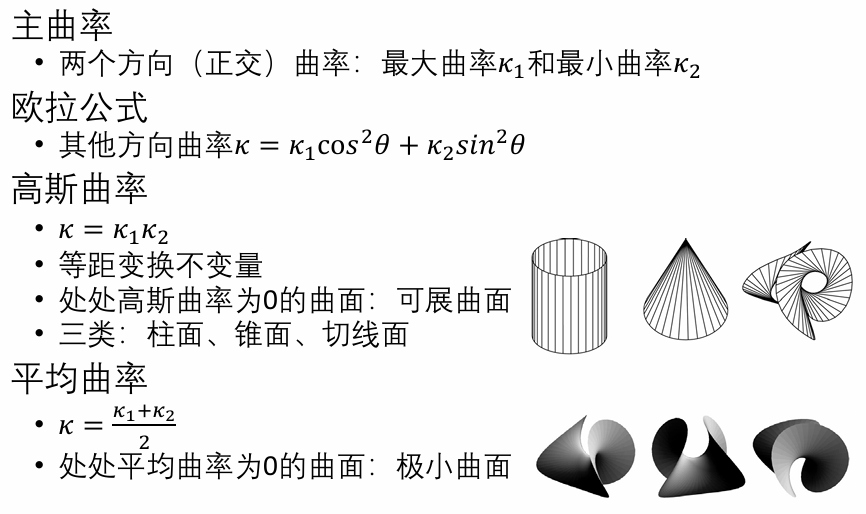
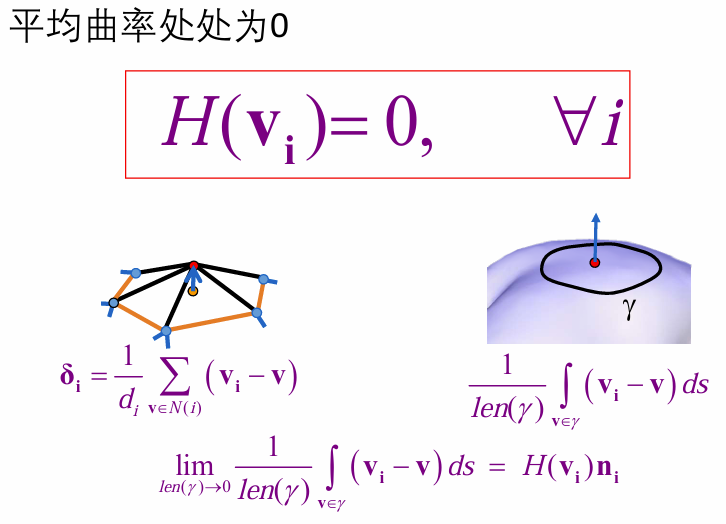
平均曲率(Mean Curvature):
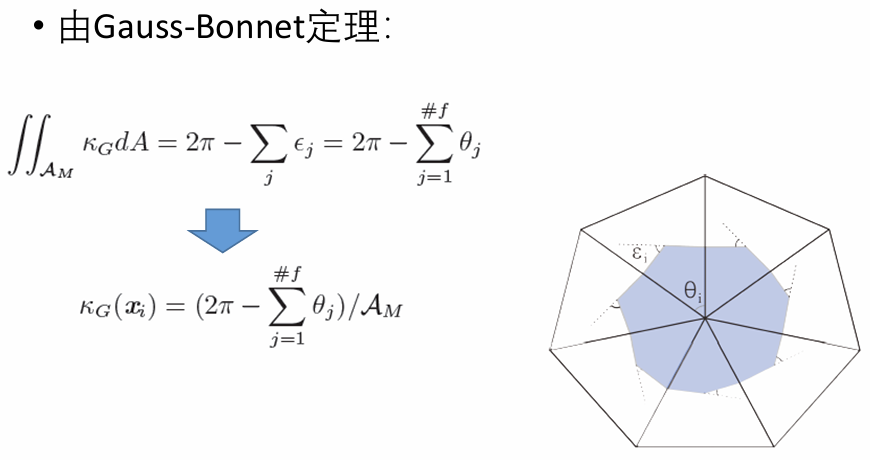
高斯曲率(Gauss Curvature):
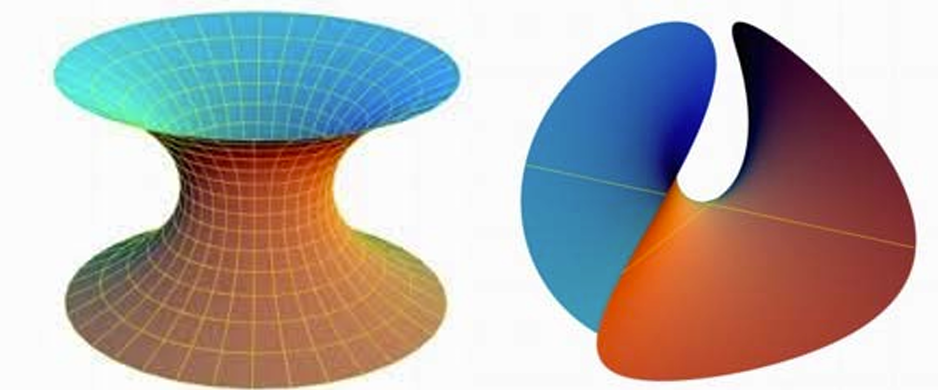
极小曲面:平均曲率处处为0的曲面
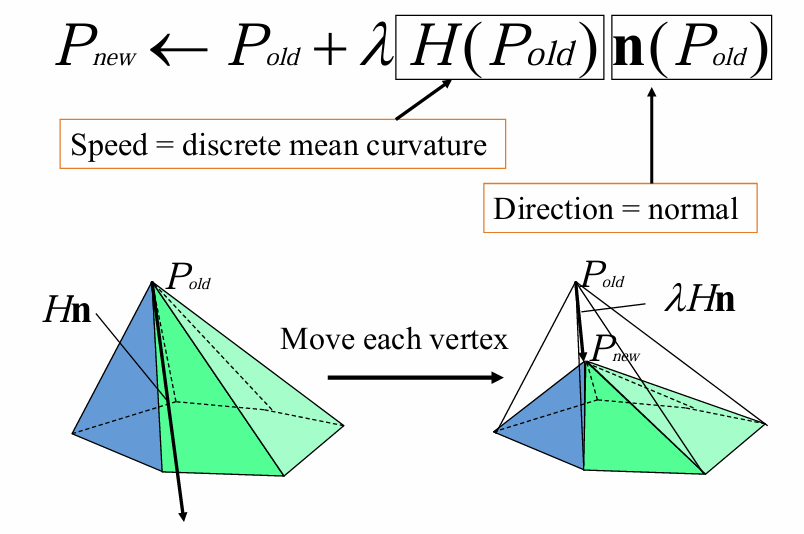
极小曲面及平均曲率流:
离散平均曲率流:极小曲面求解方法
离散极小曲面的局部迭代法
- 找到边界
- 固定边界顶点
- 对每个内部顶点
- 找顶点1‐邻域
- 更新其坐标
- 迭代
- 更新所有顶点法向
- 回到第三步
需要注意的地方:
- 只能对非封闭曲面(带一条边界)操作
- 更新坐标需要用老的顶点坐标
- 需要尝试试验不同的参数𝜆
后面介绍了科大的自研框架Utopia
其他文章

GAMES102-09-微分坐标
- 24/11/21
- 20:10
- GAMES102课程笔记
GAMES102-07-曲线光顺&离散曲线&三角网格
- 24/11/21
- 20:00
- GAMES102课程笔记