Lecture 03 Curve Fitting
一元(单变量)函数拟合:
- 线性问题:解线性方程或线性方程组
- 非线性问题:
- 凸问题:有理论保证
- 非凸问题:难,需要数值求解。
- 用梯度下降法、牛顿法、拟牛顿法等
- 须选择合适初值、步长等
- 一般要根据具体的优化问题形式及特点来设计合适的优化方法
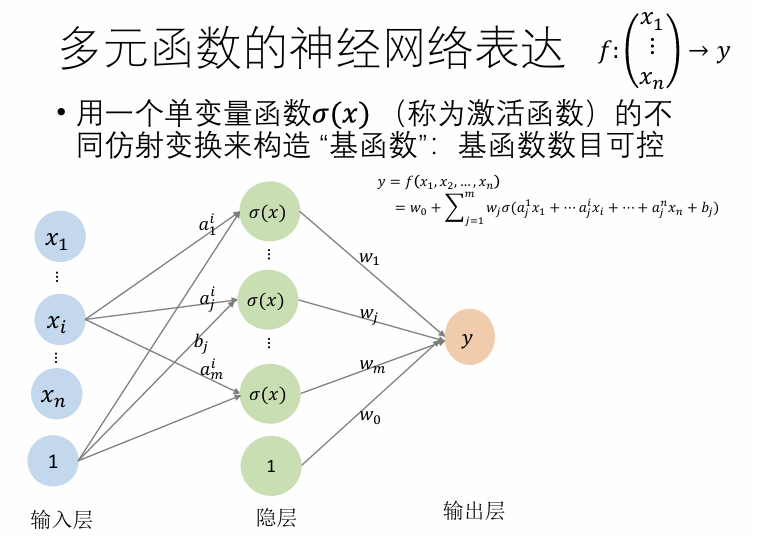
多元函数:多个变量的函数
y = f(x1, x2, ..., xn)
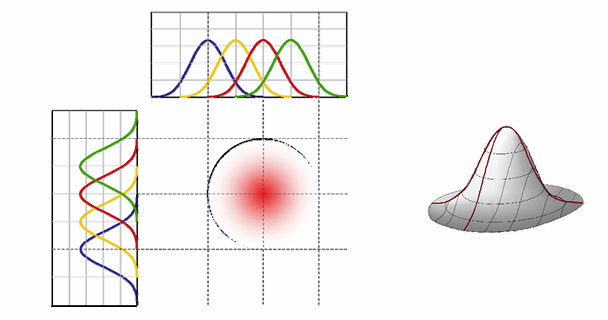
二元函数的基函数构造:张量积形式,即用两个一元函数的基函数的相互乘积来定义。
例如二次二元多项式函数的基函数为:
{1, x, y, x2, xy, y2}
三元张量积函数:
多元函数的张量积定义:
- 优点:定义简单,多个一元基函数的成绩形式
- 不足:随着维数增加,基函数个数急剧增加,导致变量急剧增加(求解系统规模急剧增加,求解代价大)
- 另一种方法:神经网络,数学上可以理解成一层神经元就是一个拟合函数
向量值函数:多个应变量
看成多个单变量函数,各个函数独立无关
- 一般会用同样的基函数(共享基函数)
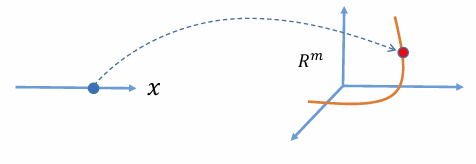
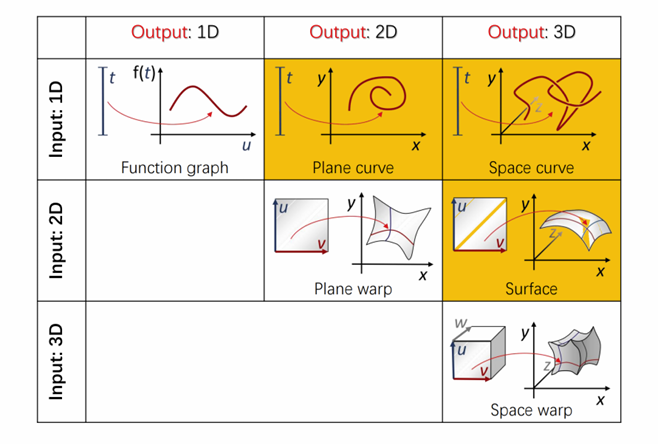
f : R1 → Rm
- 几何解释:
- 一个实数𝑥∈一维空间映射到𝑚维空间𝑅的一个点,轨迹构成𝑅的一条“曲线”
- 本质维度为1
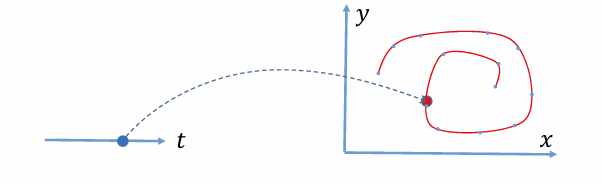
特例:平面参数曲线
f : R1 → R2
几何解释:
- 一个曲线由一个变量参数t决定,也称为单参数曲线
- 参数t可看成该曲线的“时间”变量
- 可灵活表达非函数型的曲线(任意曲线)
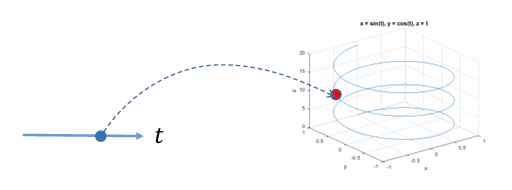
特例:空间参数曲线
f : R1 → R3
几何解释
- 一个曲线由一个变量参数t决定,也称为单参数曲线
- 参数t可看成该曲线的“时间”变量
- 可灵活表达非函数型的曲线(任意曲线)
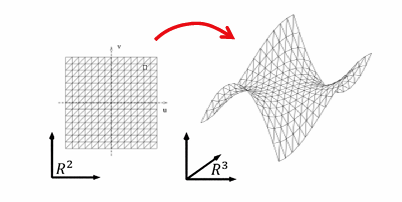
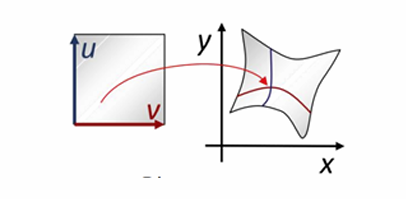
特例:参数曲面
f : R2 → R3
几何解释:
- 一个曲线由两个变量参数(u,v)决定,也称为双参数曲面(也叫流形)
- 本质维度是2
- 可灵活表达非函数型的任意曲面
特例:二维映射
f : R2 → R2
几何解释:
- 二维区域之间的映射
- 可看成特殊的曲面(第三个维度始终为0)
- 应用:图像变形
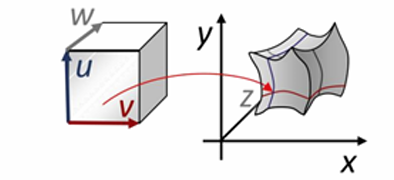
特例:三维映射
f : R3 → R3
几何解释:
- 三维体区域之间的映射
- 应用:体形变、体参数化
特例:降维映射(低维投影)
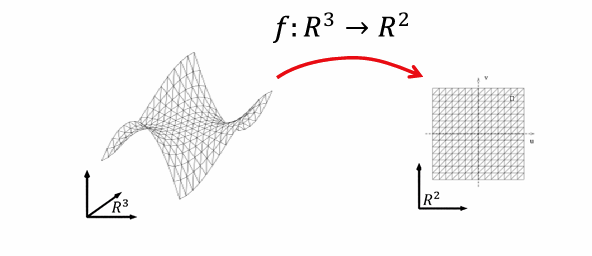
- 降维映射一般有信息丢失
- 丢失的信息大部分情况下不可逆,即无法恢复
一般映射
f : Rn → Rm
- 如果 n<m,为低维到高维的映射(高维的超曲面,n维流形曲面),本征维度为n。
- 如果n>m,为降维映射,一般信息有损失。如果n维空间中的点集刚好位于一个𝑚 维(或小于𝑚 )的流形上,则映射可能是无损的,即可以被恢复的。
低维空间之间的函数:
曲线拟合问题:
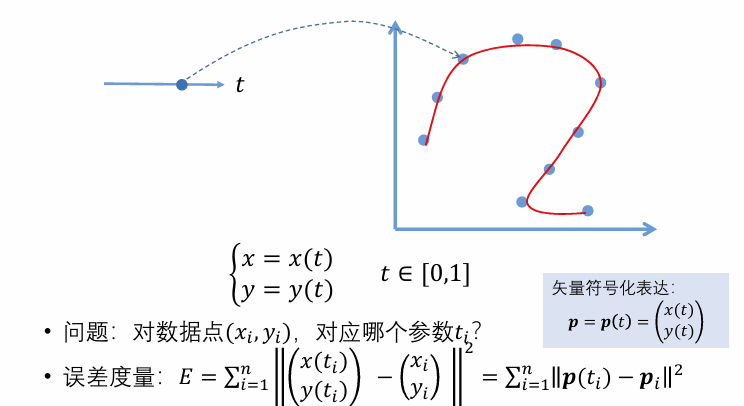
参数化问题:
- 求数据点所对应的参数(找ti):一个降维的问题
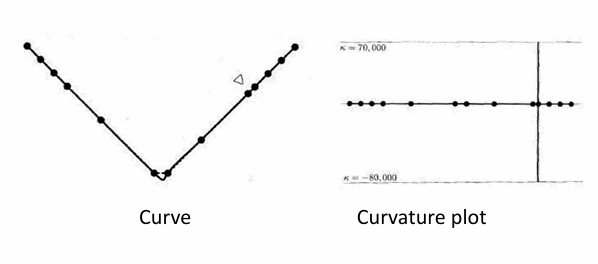
点列的参数化方式:
均匀参数化:直接映射到t轴
ti + 1 − ti = const
eg.ti = i
弦长参数化:映射到t轴并根据弦长拉伸
ti + 1 − ti = ||κi + 1 − κi||
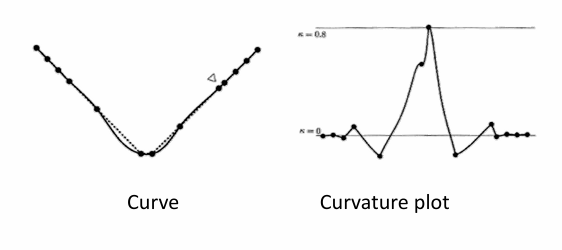
中心参数化:
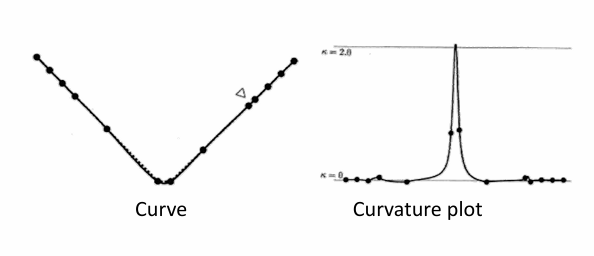
另一个例子:
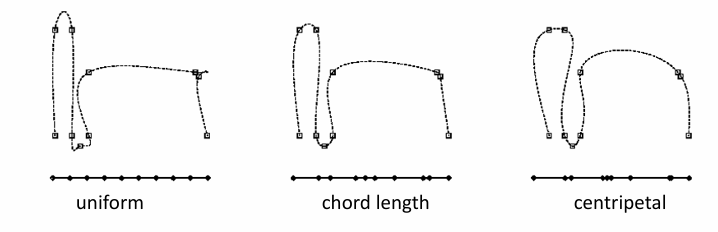
点的参数化对曲线拟合的影响很大,需要好的参数化
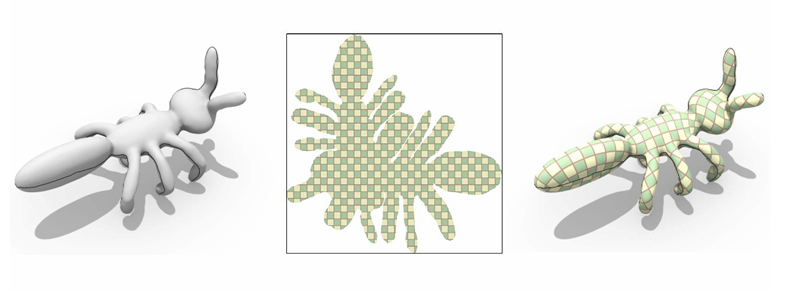
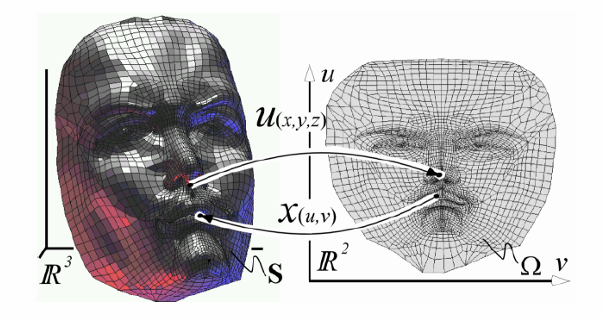
曲面参数化
三维的点找二维的参数:一个降维的问题
可展曲面:可以保长变换到平面中去,即可以被弯曲(非拉伸、收缩、皱褶或撕裂)而展开成一片平面。可展曲面是一种特殊的曲面,在微分几何中定义为在其上每一点处高斯曲率为零的曲面。
应用:
- 地图绘制(地理学)
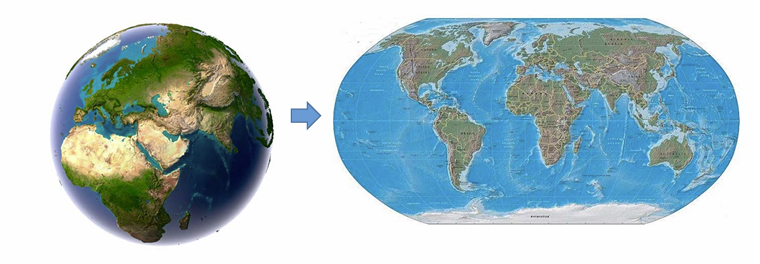
- 纹理映射(UV图)