
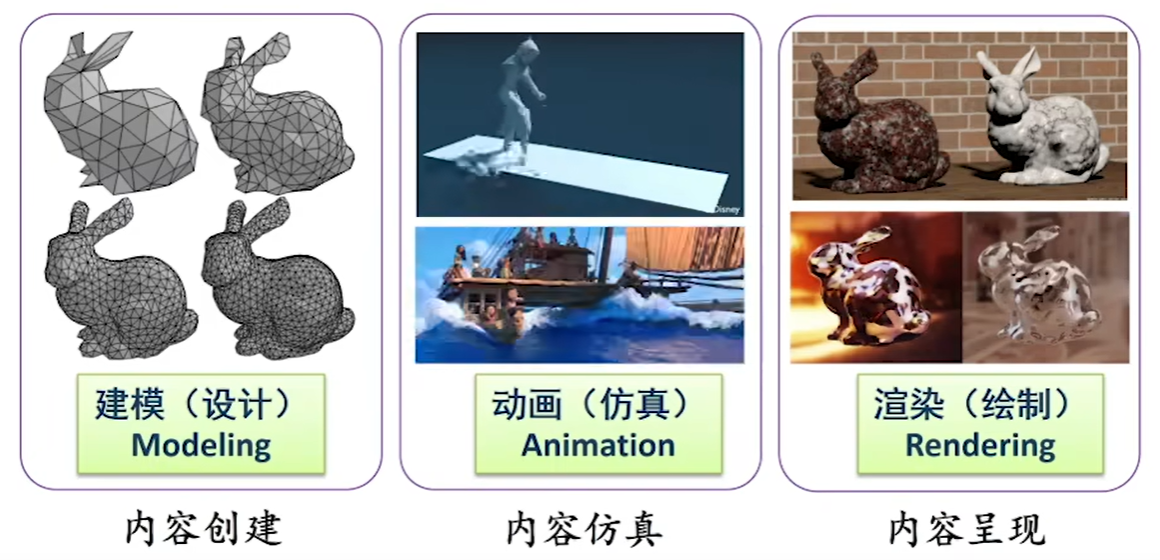
GAMES002 图形学基础研发工具
GAMES真的超级良心课程,对初学者极其友好。这门课是一些基础工具的介绍,前面的Linux/Shell这类就直接跳过了,只记录了和我需要做的点云相关的内容。
几何处理软件:CloudCompare/MeshLab/Open3D
CloudCompare:https://www.cloudcompare.org/
- 点云处理
- 开源软件(C++)
- 图形化界面
- 底层是PCL处理库
- 提供一系列插件
- 法向估计
- outliers 去除
- 点云分割
- ……
MeshLab:https://www.meshlab.net/
- PyMeshLab:https://pymeshlab.readthedocs.io/
- 比较特殊的定制脚本功能:
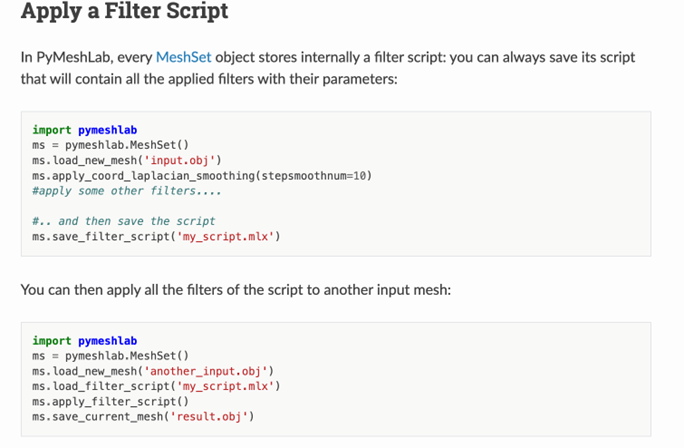
- ms.save_filter_script支持定制化脚本的功能
- 网格处理
- 开源软件(C++)
- 图形化界面 + Python API
- 同样支持各种网格算法
- 网格简化
- 凸包计算
- ……
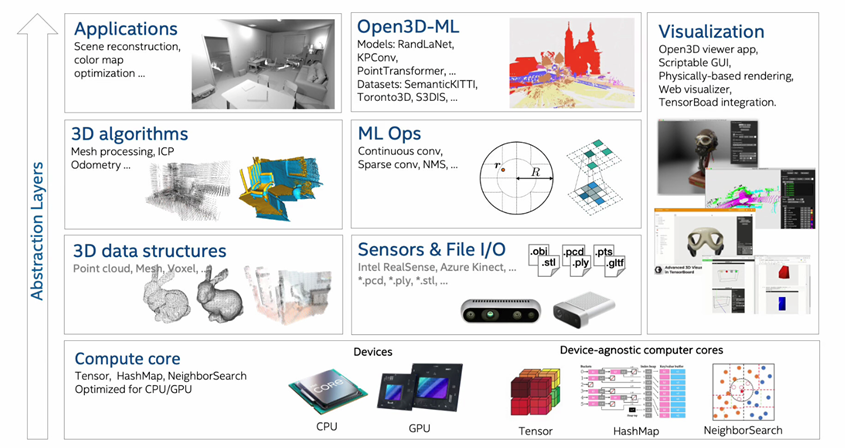
Open3D代码库:https://www.open3d.org/docs/release/
- 3D几何处理
- 开源软件(C++)
- C++/Python API
- 支持各种3D算法
- 点云处理
- 网格处理
- ……
重建工具:Colmap/ContextCapture
Colmap:https://colmap.github.io/
- 论文附带的工具
- 位姿估计+稀疏重建+稠密重建
- 渐进式重建:每张图片确定相机姿态 - 大概估算三维物体的位置,并对特殊点进行确认 - 得到稀疏点云 - 泊松重建等方法把位姿和稀疏点云变成稠密点云或网格
- 开源软件(C++)
- 图形化界面 + Python API
- 稀疏重建/稠密重建的结果可以放进MeshLab
ContextCapture:https://docs.bentley.com/LiveContent/web/ContextCapture%20Help%20v4.5-v6/zh-cn/GUID-E71D0658-82CD-46F3-B400-17F95A3939EE.html
- 实景/航拍:位姿估计+重建
- 商用软件
- 图形化界面 + Python API
其它重建工具:MetaShape/Meshroom/…
体数据可视化工具:ParaView
文档:https://docs.paraview.org/en/latest/index.html
体数据 (Volume Data):三维场,一般用网格表示
- 体素 (Voxel):网格中的一个格点,“三维的像素”
常用方法:
- 体渲染 (Volume Rendering)
- 等值面提取 (Isosurface Extraction)
- 切片可视化 (Slice Visualization)
其他文章
GAMES102-01-课程介绍
- 24/10/28
- 23:22
- GAMES102课程笔记
GAMES101-05&06-Rasterization
- 24/10/25
- 15:52
- GAMES101课程笔记